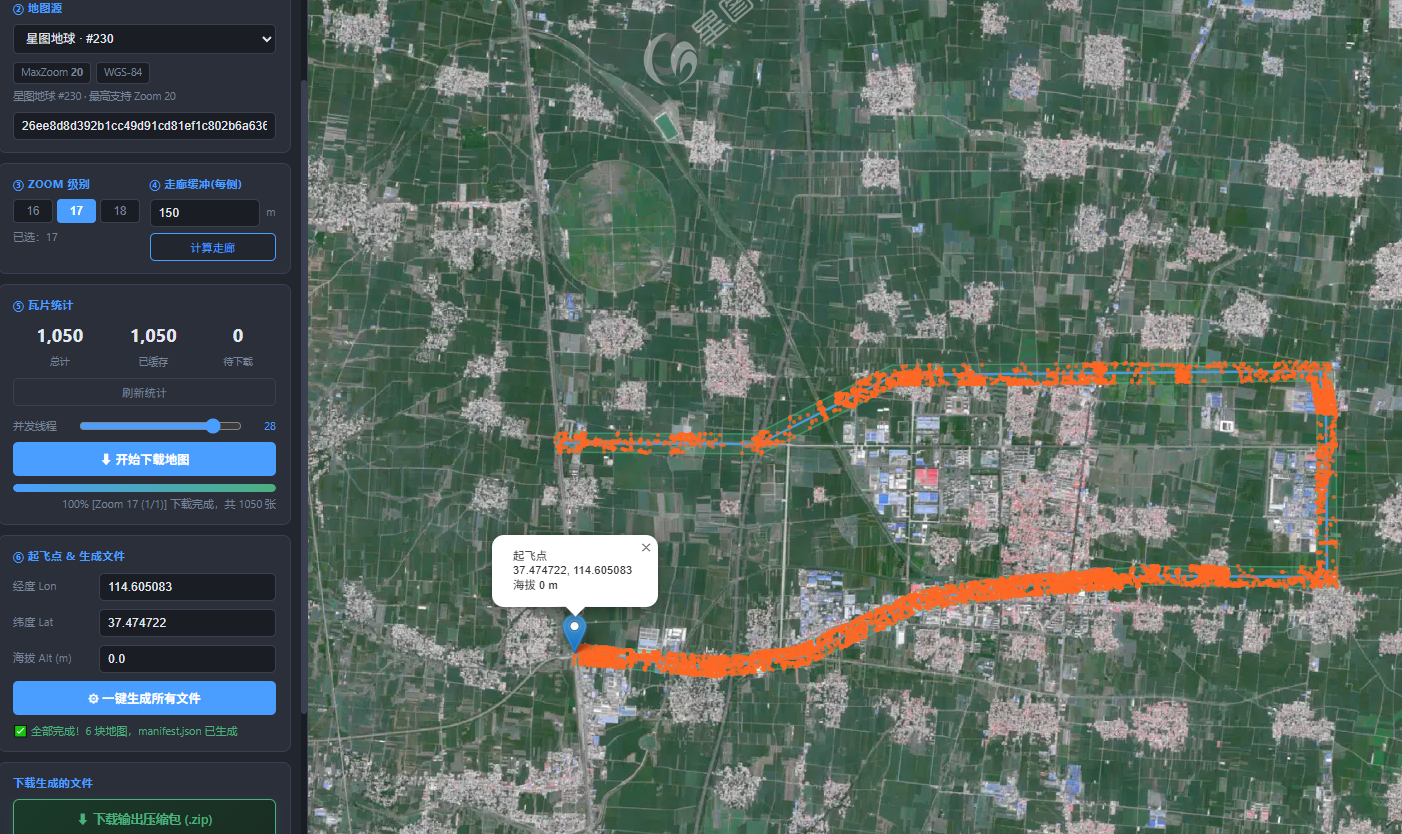
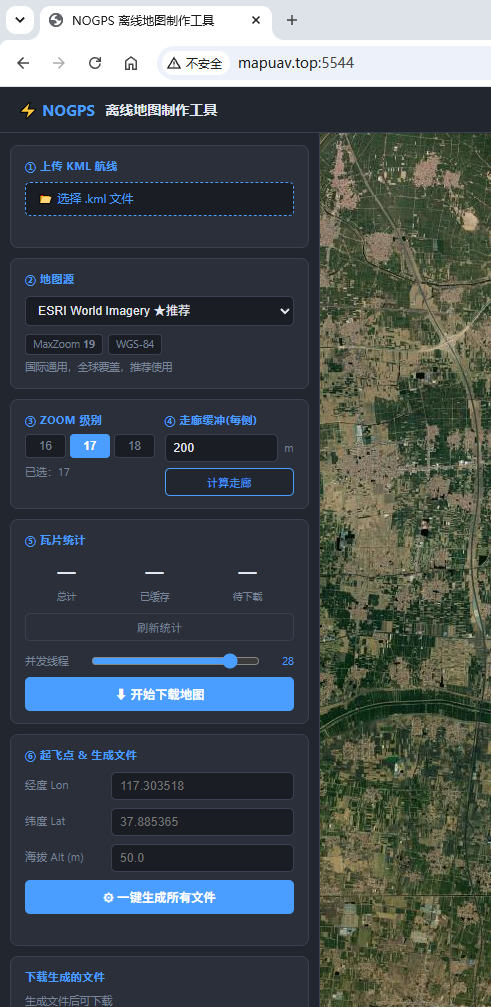
离线地图制作工具,为无GPS环境下无人机自主飞行提供地图数据支撑。支持KML航线导入、多源卫星图下载、GeoTIFF地图拼合和ORB特征索引,确保信号拒止环境下的可靠视觉导航。
| 层级 | 技术选型 |
|---|---|
| 后端框架 | Flask / FastAPI 轻量HTTP服务,本地运行 |
| 地图处理 | rasterio (GeoTIFF读写) + Pillow/OpenCV (图像拼合) |
| 几何计算 | shapely (走廊缓冲) + numpy (数组运算) |
| 特征提取 | OpenCV ORB → pickle序列化为 .idx |
| 前端地图 | Leaflet.js 可视化(航线、缓冲走廊、底图) |
| KML解析 | fastkml / lxml |
| 打包部署 | PyInstaller → 单EXE,内嵌Flask自动打开浏览器 |